Есть ли в России современное гидроакустическое вооружение? Часть 6
Чуть ранее вышли материалы:
- Есть ли в России современное гидроакустическое вооружение? Часть 1
- Есть ли в России современное гидроакустическое вооружение? Часть 2
- Есть ли в России современное гидроакустическое вооружение? Часть 3
- Есть ли в России современное гидроакустическое вооружение? Часть 4
- [Есть ли в России современное гидроакустическое вооружение? Часть 5
Понятно, что задачу освещения подводной обстановки в рамках ЕГСОНПО не решить только применением локальных бортовых ГАС и ГАК. Для освещения больших площадей необходимо использовать и определенное количество стационарных береговых (с вынесенными в море антеннами) ГАС и ГАК, и большое количество распределенных по площади морской акватории относительно недорогих других средств.
Рассмотрим некоторые возможности применения недорогих, относительно бортовых средств, одиночных буев и простых в изготовлении коротких линейных вертикальных антенн, а также недорогих, относительно БГАС «Агам», в изготовлении и постановке в позиционное положение малогабаритных стационарных пассивных ГАС дальнего обнаружения морских целей с планарными антеннами.
1). Одиночные гидрофоны или радиогидробуи (РГБ) с аппаратурой анализа сонограммы интерференции спектра шумоизлучения ПЛ-цели
В случае использования антенн с горизонтальной апертурой, обеспечивающей пространственную избирательность целей, помимо первичного некогерентного накопления (за время Тнн1) продетектированного широкополосного сигнала, возможно дальнейшее трассовое накопление отметок этого сигнала. При считывании из ДЗУ строк первично накопленных данных возможно и скользящее, в темпе просмотра панорамы, осреднение по времени трассовых отметок Nc строк, эквивалентное повышению Тнн=Тнн1*Nс. Такое вторичное накопление, в сочетании с методами компенсации влияния ВИП целей, особенно удобно при просмотре дифференцильно нормируемой панорамы, на которой отсутствует постоянная или медленно меняющаяся нестационарная составляющая (пьедестал) сигнально-помеховой смеси. Трассовое накопление повышает так называемую кумулятивную вероятность правильного обнаружения Рпо при снижении порога обнаружения. При этом, вероятность ложных тревог Рлт не повышается. Как говорится, «ложные тревоги не трассируются», то есть не накапливаются при трассировании. В этом случае, в целях повышения потенциала обнаружения, возможно применение и вторичного некогерентного накопления в сверхбыстродействующем диалоговом многопороговом режиме «оператор-дисплей», и углового сверхразрешения целей.
Этих возможностей повышения Рпо нет при работе с одиночным скалярным датчиком. Его характеристика направленности независимо от частоты – практически сферическая (помехоустойчивость антенны 0 дБ). Так как при этом нет пространственной избирательности, то невозможно использовать ни угловое сверхразрешение, ни трассовое накопление отметок продетектированного широкополосного сигнала, ни многопороговый критерий обнаружения. Поэтому, при работе с таким датчиком единственным традиционным способом повысить дистанции обнаружения является выбор оптимальной эквивалентной частоты рабочего диапазона. В режиме ШП снижение рабочих частот приводит к снижению потерь частотного затухания звука В=D*bo*СТЕПЕНЬ(f-n) и, в то же время, к сужению ширины рабочей полосы частот оптимального полутораоктавного диапазона (когда для отбеленной шумовой смеси сигнала цели с шумовой помехой fэ=fв-fн). Последнее снижает эффект некогерентного накопления 5*Lg(fэ*Tнн1).
Одиночные датчики или РГБ - недорогие ГА средства, но они не обеспечивают больших дистанций обнаружения. Даже по сильно шумящим устаревшим подлодкам их дистанции обнаружения редко превышали 1 … 2 км. Для современных же ПЛ с приведенной шумностью, например, Рс =0,03 Па/КОРЕНЬ(Гц), расчеты даже на близких к оптимальным fэ порядка 30 кГц (при приведенной помехе надводного судоходства Рпс=0,001 Па/КОРЕНЬ(Гц) или 34 дБ- Тнн1=20 с-Рлт=0,1-Рпо=0,9- пороге обнаружения Q=6,6 дБ) для условий большей части времени года показывают дистанции всего лишь 1,4 кабельтов (0,26 км) в мелком Баренцевом море (средняя Z=200 м, ММ-ППК, помехи волнения при 3 … 4 баллах Рпв=0,001 Па/КОРЕНЬ(Гц) или 34 дБ), и 1,6 кабельтов (0,3 км) в глубоководной части Тихого океана региона Камчатки (Z=3 км-ГлМ-ППК- при 2 … 3 баллах Рпв=0,0005 Па/КОРЕНЬ(Гц) или 28 дБ). При этом, для надводной цели, например, с Рс=3 Па/КОРЕНЬ(Гц), в тех же условиях (и на тех же, неоптимальных для обнаружения НК, частотах) соответствующие дистанции равны 4,8 км в мелком Баренцевом море и 4,4 км в глубоководной части Тихого океана региона Камчатки.
Однако, используя пониженный частотный диапазон и спектральный анализ морских сигналов этих пониженных частот с возможностью накопления спектра с течением времени (сонограмма спектра), можно существенно повысить дистанции обнаружения ПЛ-целей даже устройствами с одиночными датчиками.
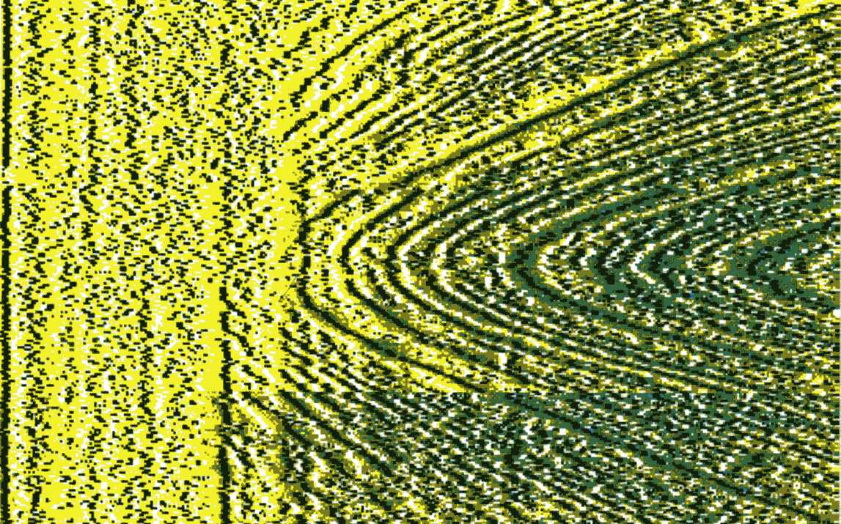
Так, капитан 1 ранга в отставке Михаил Голубев предоставил нам материалы, свидетельствующие о возможности обнаружения ПЛ-целей и их сопровождения до дистанций удаления 18 … 20 км при помощи одиночного РГБ-75 с приставкой, осуществлявшей спектральный анализ и дихотомическую («надводный/подводный») классификацию (даже в автоматическом режиме). К сожалению, Голубев не предоставил данные о Рс, Рп и прочее. В экспериментах Голубев использовал особенности интерференции лучей шумоизлучения погруженных ПЛ-целей. Пример интерференционных биений на сонограмме спектра шумоизлучения погруженной ПЛ-цели показан на рисунке 46 (копия фотоснимка Михаила Голубева). На рисунке представлены результаты обработки записи данных натурного эксперимента. Точечный датчик расположен на дне. Рабочиечастоты 20 … 80 Гц.
| Рисунок 46 (копия фотоснимка Михаила Голубева). Интерференционная панорама на сонограмме спектра шумоизлучения погруженной ПЛ-цели. |
| Источник: ЗАО «НПП «СОЮЗ» |
Кратко рассмотрим механизм проявления такого эффекта.
В случае отсутствия существенного волнения поверхности моря, для длин звуковых волн шумоизлучения цели (L), во много раз превышающих высоту волн ветрового поверхностного волнения (hпв), в точке приема может наблюдаться интерференция частот прямого луча и луча, отраженного от верхней (поверхность моря) границы волновода. Интерференция прямого луча и луча, отраженного от ровного каменистого дна в условиях мелкого моря также может наблюдаться, но она не характерна для северных морей. Интерференционные биения частот прямого и отраженного лучей (одного и того же источника) определяются коэффициентом отражения (Котр) границы раздела сред (поверхности моря) и разностью d пробега D2 и D1 этих лучей. Котр зависит от соотношения степени волнения поверхности моря и длин волн звукового шумоизлучения на рабочих частотах.
Рассмотрим рисунок 47, на котором представлены вертикальная, профильная и горизонтальная проекции прямого и отраженного интерферирующих лучей.
| Рисунок 47. Моделирование интерференции амплитудного спектра сигнала. Цель движется прямолинейно с постоянной Vц=6 узлов (3,087 м/c). Справа интерференционные панорамы 10-минутных сонограмм спектра шумоизлучения ПЛ (правая), движущейся на глубине h=50 м, и НК (левая) с центром шумоизлучения на глубине 3 м. Приемный датчик на глубине Н=200 м. |
| Источник: ЗАО «НПП «СОЮЗ» |
Отраженный луч за счет большей длины пробега имеет большее запаздывание фазы каждой тональной составляющей спектра шумоизлучения цели. Чем глубже погружена цель, тем больше это запаздывание и тем более существенно искажается сонограмма спектра шумоизлучения в месте приема. Минимальная дистанция (на траверзе - перпендикуляре к направлению движения цели) в горизонтальной плоскости для погруженной цели соответствует максимальному смещению влево гиперболического искривления линий максимумов и минимумов интерференционной панорамы на сонограмме. Если дно илистое (случай мелководных северных морей), или отсутствует гидрология типа ММ-ПДК, или приемный датчик расположен непосредственно у дна, вклад в интерференцию донного отражения отсутствует. При этом явление интерференции можно использовать для оценки степени погруженности цели, так как надводная цель не создает интерференцию (практически нет отраженного луча при малой глубине погружения излучателя шума).
Характер зависимости интерференционных биений на сонограмме спектра от глубины погружения цели и от минимальной траверзной дистанции до цели можно оценить по результатам моделирования, представленным на рисунках 48 (fн=25,6 Гц, fв=49,2 Гц, df=0,4 Гц) и 49 (fн=102,4 Гц, fв=196,8 Гц, df=1,6 Гц). В обоих случаях: время накопления спектра 10 с- Котр=0,25- вертикальный размер сонограмм соответствует 10-минутному прямолинейному ходу цели с постоянной V=6 узлов (3,087 м/c)- длина соответствующего отрезка пути цели - 1 миля (1,852 км)- датчик неподвижен на глубине Н=200 м- глубина центра шумоизлучения сверху вниз: h=3 м (НК-цель) и h= 50 м, 100 м, 200 м (ПЛ-цель)- минимальное расстояние до проходящей цели слева направо: Dг трав=0 м, 250 м, 500 м, 1 км, 2 км, 4 км.
| Рисунок 48. Моделирование интерференции амплитудного спектра широкополосного сигнала (fн=25,6 Гц, fв=49,2 Гц с частотным разрешением df=0,4 Гц). |
| Источник: ЗАО «НПП «СОЮЗ» |
Из рисунка 48 видно, что крутизна интерференционных изгибов на панораме сонограммы, зависящая от скорости изменения расстояния до цели, снижается с увеличением траверзного расстояния Dг трав. Уже при Dг трав>2 км оценка степени погруженности ПЛ-цели затруднительна. При больших Dг трав предпочтительнее работать на повышенных частотах широкополосной несущей шумоизлучения цели. Моделирование на повышенных в 4 раза частотах (fн=102,4 Гц, fв=196,8 Гц, df=1,6 Гц) показывает возможность более уверенной работы по той же ПЛ-цели и до дистанций Dг трав порядка 4 км (рисунок 49).
| Рисунок 49. Моделирование интерференции амплитудного спектра широкополосного сигнала (fн=102,4 Гц, fв=196,8 Гц с частотным разрешением df=1,6 Гц). |
| Источник: ЗАО «НПП «СОЮЗ» |
На рисунке 50 представлены результаты моделирования интерференции амплитудного спектра широкополосного сигнала удаленной (Dг трав=8 км) ПЛ-цели cVц=12 узлов на рабочих частотах, повышенных еще в 4 раза (fн=409,6 Гц, fв=787,2 Гц, df=6,4 Гц).
| Рисунок 50. Моделирование интерференции амплитудного спектра широкополосного сигнала удаленной (Dг тр=8 км) ПЛ-цели cVц=12 узл. fн=409,6 Гц- fв=787,2 Гц- df=6,4 Гц. |
| Источник: ЗАО «НПП «СОЮЗ» |
Интерференционные биения на разнесенных в пространстве различных датчиках антенны ГАС или ГАК не одинаковы. Использовать эффект интерференции в этом случае можно при работе с одним выборочным датчиком. К сожалению, мы не проводили подобные исследования с одиночным датчиком в реальных морских условиях. Можно лишь приближенно оценить условия применимости рассмотренного интерференционного алгоритма.
Не имея результатов эксперимента, считаем допустимой высоту волн поверхности моря не менее, чем на порядок меньшей по сравнению с длиной волны Lmin=Cзв/fmaxсоставляющей спектра шумоизлучения цели наивысшей частоты fmax (здесь: Сзв – cкорость распространения звука в морской среде (около 1500 м/с). При этом, поверхность моря можно условно считать зеркальной, когда лишь часть энергии падающего на поверхность луча рассеется и под углом отражения, равным углу падения, отразится достаточно значимая ее часть. Из представленных данных таблицы 1 следует, что в этом случае, например, при выборе верхней частоты анализируемого спектра fв=75 Гц эффект интерференции можно использовать при волнении до 4 баллов.
| Таблица 1. Ориентировочный выбор fв спектра интерференционной панорамы в зависимости от волнения поверхности моря |
| Источник: ЗАО «НПП «СОЮЗ» |
Еще раз подчеркнем, что это условие предположительное и требует экспериментального подтверждения в морских условиях при работе с реальной ПЛ-целью.
Следует отметить, что снижение рабочих частот для работы с интерференционной панорамой позволяет оптимизировать режим традиционного шумопеленгования надводного корабля на больших дистанциях. В таблице 2 представлены результаты расчетов дистанции традиционного шумопеленгования в полутораоктавных диапазонах современного надводного корабля с Рс=3 Па/КОРЕНЬ(Гц) при помощи вышерассмотренного одиночного датчика.
| Таблица 2. Расчетная дальность обнаружения (в км) НК с Рс=3 Па/КОРЕНЬ(Гц) при шумопеленговании с одиночным гидрофоном в полутораоктавных диапазонах низких рабочих частот. |
| Источник: ЗАО «НПП «СОЮЗ» |
2). Короткая вертикальная линейная антенна (ЛВА) с аппаратурой обработки амплитудно-модулированных СНЧ сигналов морских шумов пассивной «подсветки» погруженной движущейся ПЛ-цели
Такая антенна относительно недорога в изготовлении и постановке в позиционное положение. По сравнению с одиночным гидрофоном она позволит существенно ослабить негативное влияние шумов поверхностного волнения и, соответственно, позволит использовать эффект СНЧ. Здесь отсутствует пространственная избирательность в горизонтальной плоскости.
Поэтому, при работе с ЛВА, как и с одиночным датчиком, невозможно использовать ни угловое сверхразрешение в горизонтальной плоскости, ни трассовое накопление отметок продетектированного широкополосного сигнала, ни многопороговый критерий обнаружения. И единственным традиционным способом повысить дистанции обнаружения в этом случае является опять же выбор оптимальной эквивалентной частоты рабочего диапазона. Здесь учитываются не только потери частотного затухания звука В и эффект некогерентного накопления (как при использовании одиночного гидрофона), но и связанная с дополнительной помехоустойчивостью оптимальная ширина Шв (по уровню минус 3 дБ) центрального лепестка вертикальной диаграммы направленности (ДНв). По данным профессора Сухаревского, вертикальный сектор прихода лучей шумоизлучения цели равен примерно 30 … 40 градусов. Если Шв меньше этого сектора, будут потери энергии сигнала цели, если больше – возрастут шумовые помехи. Для получения Шв около 30 градусов на эквивалентной частоте рабочего диапазона, достаточно использовать около 9-и датчиков (c шагом, равным половине длины волны fв: dд= Lв/2 при fв=1,5*fэ=3*fн). При этом, необходимая Шв достигается при амплитудном взвешивании сигналов элементарных каналов (ЭК) по закону Хэмминга, обеспечивающем хорошее (около 40 дБ по тональному и около 50 дБ по широкополосному сигналу) подавление боковых лепестков ДНв и, соответственно, хорошую отстройку от ближних шумов поверхностного волнения.
Wi=0,54-0,46*COS(2*ПИ()*(i-1)/(N-1)). Здесь:
Wi – весовой коэффициент уровня сигнала i-го ЭК-
N – общее число ЭК.
В нашем случае, для N=9 соответствующие значения Wi следующие:
0,08- 0,215- 0,54- 0,865- 1- 0,865- 0,54- 0,215- 0,08.
Длина (в нашем случае высота) такой антенны La=dд*(N-1)=4*Lв, определяется выбором fэ.
Лепестковая диаграмма направленности в дБ (на fэ) такой ЛВА в вертикальной плоскости (рисунок 51) показывает хорошую отстройку от ближних помех поверхностного волнения.
| Рисунок 51. Лепестковая ДНв (на fэ при Lа=4*Lв) 9-элементной ЛВА. |
| Источник: ЗАО «НПП «СОЮЗ» |
Однако, помехоустойчивость такой ЛВА небольшая, всего около 6 дБ. Поэтому, в традиционном режиме широкополосного шумопеленгования дистанции обнаружения современных малошумных целей с такой антенной остаются незначительными. Даже на близких к оптимальным fэ порядка 20 кГц они, относительно вышерассмотренных одиночных датчиков (на fэ порядка 30 кГц) в тех же условиях повышаются для ПЛ-цели всего в 2,6 раза (до 3,7 кабельтов или до 0,69 км) в мелком Баренцевом море и в 1,8 раза (до 2,9 кабельтов или до 0,54 км) в глубоководной части Тихого океана региона Камчатки. При этом для НК-цели на fэ порядка 20 кГц, относительно одиночных датчиков (на fэ порядка 30 кГц), в тех же условиях соответствующие дистанции повышаются всего в 1,7 раза (до 8 км) в мелком Баренцевом море и в 2 раза (до 9 км) в глубоководной части Тихого океана региона Камчатки.
Но все же, применив метод анализа СНЧ сигналов, с такими относительно недорогими антеннами можно достигать неплохих результатов обнаружения даже бесшумных ПЛ-целей. Рассмотрим возможность выделения СНЧ сигнала при отсутствии горизонтальной направленности антенны. В этом случае типовая глубина СНЧ АМ – Mснчmax (около 40 % в глубоком море и около 20 % в мелком Баренцевом), определяемая морскими шумами подсветки в секторе Bснч (рисунок 52) от дистанций Dп (с которых звук затухает на 3 дБ) до Dпл, «разбавляется» морскими шумами полного кругового сектора 360 градусов радиуса Dп. Соответствующий Мснч меньше Mснчmax в корень из отношения площадей Sп/Sснч «подсветки». Чем дальше ПЛ-цель от антенны, тем меньше Sснч «подсветки» и, соответственно, Мснч. Предельной дистанции обнаружения ПЛ методом СНЧ соответствует снижение Мснч до порогового уровня (Q) над его минимальным фоновым уровнем (оцененным нами экспериментально около 3,6%).
Расчеты (таблица рисунка 52) показывают, что и в мелком, и в глубоком море для использования метода СНЧ при работе с ЛВА оптимальна работа в полутораоктавных диапазонах рабочих частот с fэ порядка 40 … 120 Гц.
| Рисунок 52. Расчет дистанций обнаружения бесшумных ПЛ-целей методом анализа СНЧ с использованием ЛВА. |
| Источник: ЗАО «НПП «СОЮЗ» |
Для таких fэ длина (высота) антенны Lа=4*Lв=4*Сзв/(1,5*fэ)=100 … 33 м слишком велика. Помимо удорожания антенн, это вызывает неудобства при постановке их большого количества в защищаемой акватории. В то же время, данные таблицы рисунка 52 показывают, что близки к оптимальной и fэ=360 Гц в глубоком и мелком морях, и fэ=1080 Гц в глубоком море. Следовательно, можно применить относительно дешевые и удобные в постановке ЛВА с Lа порядка 11 … 3,7 м для использования эффекта СНЧ в глубоком море и с Lа порядка 11 м для использования эффекта СНЧ в мелком море.
Возможность обнаружения погруженных движущихся ПЛ методом анализа СНЧ АМ сигналов ЛВА была подтверждена нами при работе с прибором «АМ2/3» на Черном море при глубине места около 700 м (рисунок 1 части 1 статьи, внизу слева). ЛВА имела 11 датчиков, fэ около 1,5 кГц. Тогда наблюдалось уверенное сопровождение до дистанции 10 … 11 км ДПЛ «Варшавянка», удалявшейся со скоростью 3 … 5 узлов. СНЧ фильтр достаточно эффективно отсеивал помехи надводного судоходства. Так, от сухогруза, приведенная шумность которого в несколько десятков раз превышала шумность ДПЛ, на дистанции 4 км уровень сигнала на выходе СНЧ фильтра был на 6 … 10 дБ меньше уровня сигнала от ДПЛ, находящейся на такой же дистанции.
Как и в случае использования одиночного датчика на низких рабочих частотах, при работе с оптимизированной под СНЧ эффект ЛВА также следует отметить, что снижение рабочих частот и в этом случае позволяет оптимизировать режим традиционного шумопеленгования надводного корабля на больших дистанциях. В таблице 3 представлены результаты расчетов дистанции традиционного шумопеленгования в полутораоктавных диапазонах современного надводного корабля с Рс=3 Па/КОРЕНЬ(Гц) при помощи вышерассмотренной ЛВА.
| Таблица 3. Расчетная дальность обнаружения (в км) НК с Рс=3 Па/КОРЕНЬ(Гц) при шумопеленговании с ЛВА в октавных диапазонах низких рабочих частот. |
| Источник: ЗАО «НПП «СОЮЗ» |
3). Стационарные пассивные ГАС «Дельта-С» с планарными антеннами на основе «кардиоидных» датчиков.
Кратко рассмотрим и направление создания относительно недорогих стационарных антенн для дальнего шумопеленгования. Мы критически относимся к используемым ВМС США уложенным на дне недорогим ниткам датчиков линейных антенн или установленным на подводных склонах площадных антенн из нескольких ниток датчиков. Одиночные линейные нитки обладают малой помехоустойчивостью Х=10*Lg(2*La/Lэ) и не обеспечивают однозначность пеленгования, не имеют отстройки от ближних помех поверхностного волнения. ГАС с такими антеннами способны обеспечивать обнаружение только при прохождении целью рубежа вблизи антенны с дальнейшей потерей удаляющейся цели. Планарные антенны из нескольких лежащих на подводных склонах ниток имеют сниженную площадь проекции на плоскость, перпендикулярную направлению на цель. Хорошо сконструирована (за исключением системы уплотнения-разуплотнения сигналов датчиков) антенна «Агам» (ЦНИИ «Морфизприбор»), но она чрезмерно дорогая в изготовлении и постановке в позиционное положение. «Агам» использует две параллельные, отстоящие друг от друга на Lв/4 (четверть длины волны верхней частоты рабочего диапазона) так называемые «звукопрозрачные» планарные антенны (имеющие одинаковые ДН «вперед» и «назад»), каждая из 120-и вертикальных ниток со скалярными (ненаправленными) датчиками-гидрофонами). Из сигналов датчиков первого ряда, прошедших через фазовращатели со сдвигом фазы сигнала Ф(fв), близким к «-90 градусов», вычитаются сигналы соответствующих им датчиков второго ряда. Характеристика направленности (ХН) каждого такого сдвоенного датчика имеет форму так называемой «кардиоиды» с широким центральным приемным лучом. Антенна с такими «кардиоидными» датчиками почти эквивалентна классической «экранированной сзади» планарной антенне.
По такому же принципу, на основе «кардиоидных» датчиков, можно построить планарную антенну, существенно меньшую по габаритам и более дешевую, относительно антенны «Агам», но имеющую достаточную апертуру для дальнего обнаружения морских целей в стратегически важных камчатских и дальневосточных регионах глубоководного Тихого океана. Чтобы разброс чувствительности датчиков не влиял на «кардиоиду», сигнал каждого датчика должен проходить через свой каскад автоматической регулировки усиления (АРУ). При конструировании антенны целесообразно ориентироваться на два полутораоктавных диапазона рабочих частот: ЧД1 (НЧ) и ЧД2 (ВЧ). В этом случае в целях оценки D и Рс целей можно применить метод решения системы двух уравнений гидролокации (в двух ЧД). Для работоспособности метода, разделение на ЧД1 и ЧД2 должно осуществляться после общей для них системы АРУ, иначе исказится соотношение уровней НЧ и ВЧ компонент сигнала цели, зависящее от связанного с дистанцией частотного затухания звука.
При диаграммоформировании для системы дальнего обнаружения целесообразно ориентироваться лишь на один горизонтально ориентированный пространственный канал в вертикальной плоскости с компромиссной шириной центрального лепестка Швнч и Шввч, отличающейся от оптимального сектора 30 … 40 градусов прихода лучей в вертикальной плоскости. Здесь дело не столько в экономической целесообразности отказа от линий задержки (ЛЗ) для наклонных приемных лучей ВПФ - вертикального пространственного фильтра (современные ПЛИС и микросхемы ОЗУ позволяют легко реализовывать эти ЛЗ), сколько в неудобстве использования оператором большого количества экранных трассовых панорам. Так, например, в ГАК «Скат-3» ради повышения помехоустойчивости применены ВПФ с узкими центральными лепестками ДН на ВЧ диапазонах (за счет повышения fв и увеличения высоты антенны На, приведших к существенному повышению количества гидрофонов и ЭК, соответственно - к удорожанию антенны и СПО. Для перекрытия сектора приема звуковых лучей общее количество частотно-пространственных горизонтальных и наклонных в вертикальной плоскости каналов (ВПЧК) только в ЧД4 достигает десятка, а всего (во всех ЧД) почти в два раза больше. Следовательно, необходимо использовать столько же одновременно работающих трактов горизонтального диаграммоформирования. Но на экран не выведешь одновременно столько трассовых панорам. В «Скате-3» на экран выводятся отметки амплитудных уровней строк текущих первично обработанных данных лишь нескольких, выбранных оператором ВПЧК. Кроме того, на экран выводится из множества лишь одна, выбранная оператором, трассовая панорама. Но строка отметокамплитудных уровней текущих первично обработанных данных малоэффективна по сравнению с отражающей ретроспективу трассовой панорамой. Зрительное и аналитическое интегральное восприятие оператором сигнальных и помеховых отметок трассовой панорамы, использование им психо-физиологических способностей мозга гораздо эффективнее автоматического обнаружения по строкам текущих данных. Известно, что там, где для принятия правильного решения оператору достаточно обзора даже только 2-х … 3-х строк трассовой панорамы, автомату требуется 100 строк обзора. Поэтому-то во всех современных ГАС и ГАК окончательное решение об обнаружении цели принимает не автомат, а оператор. Задача же автоматических вычислителей – облегчить принятие этого решения при помощи быстрого вычисления характерных параметров сигнала цели. К сожалению, при создании ГАК «Скат-3» не был найден оптимальный компромисс между высокой избирательностью лучей вертикального пространственного фильтра (ВПФ) и их требуемым количеством для полного охвата сектора прихода звуковых лучей цели. Дорогостоящая неоптимальная погоня за максимально высоким значением помехоустойчивости ВПФ ошибочна. Вы же не будете смотреть одновременно в десяток направленных под разными углами телескопов при визуальном поиске дальнего (на линии горизонта) корабля, а предпочтете один, с меньшим угловым разрешением, бинокль. Ценой ошибки разработчиков явилась работа лишь с одной трассовой панорамой при бездействии остальных из почти двух десятков пространственно-частотных каналов ВПЧК «Ската-3». При взаимном изменении дистанции движущихся цели и носителя ГАК сигнал цели лишь кратковременно появляется в узком приемном луче одного, выбранного оператором для трассовой панорамы ВПЧК. Поэтому-то велика вероятность пропуска цели. И поэтому, несмотря на высокую чувствительность в узком приемном луче, обычно, на экранах «Ската-3» ПЛ-цель наблюдается не постоянно, а кратковременными эпизодами.
Сильношумящие НК в режиме шумопеленгования (ШП) обнаруживаются на больших дистанциях. Для снижения потерь затухания звука В=bo*D*СТЕПЕНЬ(f-n) в этом случае целесообразно использовать низкие рабочие частоты. ПЛ с существенно меньшей Рс в режиме ШП обнаруживаются на ближних дистанциях, на которых целесообразно работать на более высоких частотах. Хотя в этом случае потери затухания звука В возрастают, но из-за небольших D они менее значимы, чем возрастание потенциала обнаружения из-за повышения коэффициента помехоустойчивости поверхностной антенны Х и эффекта некогерентного накопления Энн.
X, дБ=10*Lg(4*ПИ()*Sa/(Lэ*Lэ))-
Для планарной антенны Sa=Ha*La. Так как важна не сама Sa, а ее проекция на плоскость, перпендикулярную направлению на цель, то для направлений на цель под углом компенсации Ак относительно перпендикуляра к плоскости планарной антенны Х снижается и вычисляется по формуле: X, дБ=10*Lg(4*ПИ()*Ha*La *COS(Aк)/(Lэ*Lэ))- При Ак=60 градусов потери Х составляют 3 дБ, поэтому, как правило, сектор углов компенсации планарных антенн (сектор обзора антенны) ограничивают курсовыми углами КУ=Ак=-60 … 0 … 60 градусов.
Энн, дБ=5*Lg((fв-fн)*Тнн)=5*Lg(fэ*Тнн) для оптимальных полутораоктавных частотных диапазонов.
С учетом этих особенностей влияния fэ на потенциал обнаружения системы, оптимизируем fэ нч (ЧД1) для шумопеленгования НК-цели на дистанциях не менее 1000 км. При этом, для желаемых дистанций обнаружения ПЛ-цели, fэ вч=3*fэ нч может не быть оптимальной, но более подходящей для обнаружения ПЛ-цели и более точного пеленгования. Недостаточная оптимальность fэ вч при обнаружении целей в ГАС «Дельта-С» при работе в глубоком море компенсируется большой эффективностью классификационного тракта СНЧ, для которого опять же более целесообразно использовать ЧД1. С учетом оптимизированной fэ нч и, соответственно, fв вч=1,5*fэ вч=4,5*fэ нч, выберем экономически целесообразные конструктивные параметры планарной антенны, позволяющие, при подстановке их в уравнение пассивной гидролокации, достичь с Рлт не более 0,1 (640 с) и Рпо не менее 0,9 дальности обнаружения современного надводного корабля (НК) с Рс порядка 3 Па/КОРЕНЬ(Гц) не менее 1000 км и удовлетворительной дальности по современной малошумной ПЛ-цели с Рс=0,03 Па/КОРЕНЬ(Гц) для условий типовой гидрологии камчатского региона (Z=3 км, ГлМ-ППК, волнение 2-3 балла) и при приведенной помехе надводного судоходства Рпс=0,001 Па/КОРЕНЬ(Гц).
Оптимальная частота fэ=fopt находится из условия dФ/df=0, где Ф – потенциал обнаружения - левая часть уравнения гидролокации (в правой – Q – выходное соотношение «сигнал / помеха» при заданных вероятностях ложных тревог и правильного обнаружения системы). На fopt полная величина затухания звука B=(m/n)*10*Lg(e) не зависит от bo, D и вида системы обнаружения.
Для пассивной системы fopt вычисляется по следующей формуле:
fоpt, кГц=СТЕПЕНЬ(m*10*Lg(e)/(bo*n*D)-1/n), где:
- D - дистанция в км-
- m – показатель при частоте для отношения «сигнал / помеха» на выходе системы обнаружения. Для пассивной системы m=mc-mn mx 0,5. Здесь:
mc, mn, mx и число 0,5 – показатели при частоте соответственно для спектра сигнала цели, спектра помехи, помехоустойчивости приемной антенны и частотной зависимости эффекта интегрирования (степенные функции частоты в уравнении гидролокации). В качестве преобладающей помехи, в условиях современного подводного носителя или для стационарной антенны, можно считать морской шум с осредненным спадом огибающей спектра, меньшим, но близким к закону «-6 дБ/октава».
При выборе оптимальных полутораоктавных рабочих диапазонов (fв-fн=fэ) в среднем можно считать mc=mn=-2.
Для поверхностных (в том числе и планарных) антенн mx=2. Таким образом, в нашем случае m=2,5.
Остальные коэффициенты рассматривались ранее.
Для камчатского региона (Z=3 км- bo=0,0273 дБ/км на 1 кГц- n=1,5)для Dнк=1000 км fopt=0,412 кГц.
Задаемся fэнч=0,4 кГц. Таким образом, определились значения рабочих частот полутораоктавных диапазонов.
ЧД1: fннч=fэнч/2=0,2 кГц- fвнч=3*fннч=0,6 кГц.
ЧД2: fнвч=fвнч=0,6 кГц- fэвч=2*fнвч=1,2 кГц- fввч=3*fнвч=1,8 кГц.
Выбираем экономически целесообразные размеры антенны, обеспечивающие шумопеленгование НК в выше изложенных условиях на D порядка 1000 км при подстановке соответствующей помехоустойчивости антенны Xнч в уравнение дальности.
Шаг между датчиками dд=Lввч/2=Сзв/(2*fв вч)=0,417 м.
Задаемся Nд Lа=32 и Nд На=8. Тогда антенна имеет относительно небольшие, для экономически целесообразного изготовления, транспортировки и постановки в позиционное положение, длину и высоту рабочей части:
Lа, м=dд*(Nд Lа-1)=12,917 м-
На, м=dд*(Nд Hа-1)=2,917 м.
При этом, с учетом конструктивных потерь КП=2 дБ (из-за неполного соответствия «кардиоидной» и «экранированной сзади» антенн):
Xнч=19 дБ, Хвч=23,8 дБ на траверзе антенны-
Xнч=16 дБ, Хвч=20,8 дБ при углах компенсации цели Ак=-60 и Ак= 60 градусов.
Результаты решения уравнения гидролокации с этими параметрами антенны для выше изложенных гидролого-акустических условий камчатского региона глубоководного Тихого океана с автоматическим порогом обнаружения (Q=10,3 дБ- Рлт=0,1- Рпо=0,95), в диалоговом многопороговом режиме (при Q=3 дБ), а также с аналогичными порогами обнаружения в режиме углового сверхразрешения представлены в таблицах 4 (НК с Рс=3 Па/КОРЕНЬ(Гц) на траверзе антенны и при Ак=60 градусов) и 5 (ПЛ с Рс=0,03 Па/КОРЕНЬ(Гц) на траверзе антенны и при Ак=60 градусов).
Видно, что поставленные условия обнаружения НК на дальности порядка 1000 км выполнены даже для режима шумопеленгования с автоматическим порогом обнаружения:
Dнкнч=1246 км на траверзе и Dнкнч=969 км при Ак=60 градусов.
Для ПЛ-цели дистанции шумопеленгования даже в многопороговом режиме углового сверхразрешения существенно меньше:
Dплвч=93 км на траверзе и Dплвч=59 км при Ак=60 градусов.
| Таблица 4. Расчетная дальность обнаружения (в км) НК с Рс=3 Па/КОРЕНЬ(Гц) при шумопеленговании с антенной «Дельта-С» при Ак=0 и Ак=60 градусов. |
| Источник: ЗАО «НПП «СОЮЗ» |
| Таблица 5. Расчетная дальность обнаружения (в км) ПЛ с Рс=0,03 Па/КОРЕНЬ(Гц) при шумопеленговании с антенной «Дельта-С» при Ак=0 и Ак=60 градусов. |
| Источник: ЗАО «НПП «СОЮЗ» |
Для удлиненной в 2 раза антенны «Дельта-С2» (La=26,25 м, Nд Lа=64) расчетная дистанция обнаружения ПЛ-цели при Ак=0 градусов (Q=10,8 дБ- Рпо=0,96) представлена в таблице 6.
| Таблица 6. Расчетная дальность обнаружения (в км) ПЛ с Рс=0,03 Па/КОРЕНЬ(Гц) при шумопеленговании с антенной «Дельта-С2» при Ак=0 градусов. |
| Источник: ЗАО «НПП «СОЮЗ» |
Определившись с fввч, находим разнос датчиков «кардиоидной» пары:
Dк=Lв вч/4=Сзв/(4*fввч)=0,208 м.
При использовании не идеального фазовращателя с линейной ФЧХ, а реального типового на ОУ, удобнее выбирать величину постоянной времени RСне по fв вч, а по несколько большей
fо=1/(2*ПИ()*R*C).
Например, при выборе резистора R=19000 (19 кОм), емкостиС=0,0000000039 (0,0039 МФ), fo=2148 Гц. Соответствующие «кардиоиды» (сечения ХН в любой плоскости, в дБ) для fв вч, fэ вч, fн вч=fв нч, fэ нч, и fн нч представлены на рисунке 53 слева. Они соответствуют использованию фазовращателя сигналов датчиков первого ряда с ФЧХ:
Ф(f), рад=-2*АTAN(f/fо)=-2*АTAN(f*2*ПИ()*RС).
Как видно из рисунка, АЧХ такого «кардиоидного» датчика в значительной степени компенсирует спад огибающей ШП сигнала морских шумов, поэтому в этом случае «отбеливание» спектра сигнала можно не осуществлять.
| Рисунок 53. ХН «кардиоидного» датчика в любой плоскости (слева) и ДНв в ЧД1 и ЧД2 антенн «Дельта-С» и «Дельта-С2» (справа). |
| Источник: ЗАО «НПП «СОЮЗ» |
На рисунке 53 справа представлены нормированные лепестковые (в полном угловом секторе 360 градусов) диаграммы вертикальной направленности в ЧД1 и ЧД2 антенн «Дельта-С» и «Дельта-С2», использующих такие датчики. Закон взвешивания уровней канальных сигналов в ЧД1: 1- 1- 0,95, 0,7, 0,7- 0,95- 1- 1. Ширина центрального лепестка Шв (fэ нч)=52 градуса. В ЧД2 взвешивание уровней канальных сигналов - по Хэммингу: 0,08- 0,253- 0,642- 0,954- 0,954- 0,642- 0,253- 0,08. Ширина центрального лепестка Шв (fэ вч)=30 градусов. ДНв показывают удовлетворительную отстройку от ближних шумов поверхностного волнения.
| Рисунок 54. Нормированные ДНг в ЧД1 и ЧД2 антенн «Дельта-С» (слева) и «Дельта-С2» (справа). |
| Источник: ЗАО «НПП «СОЮЗ» |
На рисунке 54 представлены нормированные лепестковые диаграммы горизонтальной направленности в ЧД1 и ЧД2 антенн «Дельта-С» (слева) и «Дельта-С2» (справа), использующих «кардиоидные» датчики, в полном угловом секторе 360 градусов. Закон взвешивания уровней канальных сигналов - по Хэммингу. Ширина центрального лепестка Шг (fэ нч)=19,8 и Шг (fэ вч)=6,6 градусов для антенны «Дельта-С». Для антенны «Дельта-С2» Шг (fэ нч)=9,9 и Шг (fэ вч)=3,3 градусов.
На рисунках 55 и 56 представлены аналогичные диаграммы соответственно при Ак= 30 и Ак=-60 градусов. По мере возрастания модуля Ак наблюдается расширение центрального лепестка ДН по закону 1/COS(ABS(Aк)) и характерное для «звукопрозрачных» антенн с «кардиоидными» датчиками возрастание паразитного зеркального лепестка в тыловом секторе антенны.
| Рисунок 55. Нормированные ДНг в ЧД1 и ЧД2 антенн с «кардиоидными» датчиками «Дельта-С» (слева) и «Дельта-С2» (справа) при Aк= 30 градусов. |
| Источник: ЗАО «НПП «СОЮЗ» |
| Рисунок 56. Нормированные ДНг в ЧД1 и ЧД2 антенн с «кардиоидными» датчиками «Дельта-С» (слева) и «Дельта-С2» (справа) при Aк=-60 градусов. |
| Источник: ЗАО «НПП «СОЮЗ» |
Оценка возможности ГАС «Дельта-С» и «Дельта-С2» обнаружения бесшумных ПЛ-целей методом анализа сигнала СНЧ «подсветки» морскими шумами показывает хорошие возможности такого обнаружения в глубоком море (рисунок 57).
| Рисунок 57. Расчет дистанций обнаружения бесшумных ПЛ-целей методом анализа СНЧ с использованием планарных антенн ГАС «Дельта-С» и «Дельта-С2». |
| Источник: ЗАО «НПП «СОЮЗ» |
Следует отметить, что в выше рассмотренных условиях постановки антенны БГАС «Агам» дистанции обнаружения бесшумных ПЛ-целей будут существенно больше вследствие СНЧ «подсветки» распределенными шумами дальнего морского судоходства.
В целом, относительно недорогие стационарные ГАС «Дельта-С» (512 одиночных скалярных датчиков-гидрофонов) и «Дельта-С2» (1024 датчика) позволят обеспечить подводное и надводное ГА освещение значительной площади стратегически важных глубоководных камчатских и дальневосточных районов Тихого океана, а также Черного моря.
Примерная конструкция антенны «Дельта-С» и функциональная схема размещенной в погруженном гермоблоке аппаратуры обработки антенных сигналов представлена на рисунке 58.
| Рисунок 58. Примерная конструкция планарной антенны «Дельта-С» с «кардиоидными»датчиками и функциональная схема аппаратуры гермоблока антенны. |
| Источник: ЗАО «НПП «СОЮЗ» |
Итак, при помощи относительно недорогих ГАС со звукопрозрачными планарными антеннами с кардиоидными датчиками и множества относительно недорогих одиночных РГБ и относительно коротких ЛВА, установленных на расстояниях порядка 10 км друг от друга, можно осуществлять подводное освещение значительных площадей наших морских акваторий. Для этого, конечно, необходимо осредненные с Тн=10 с данные спектрального анализа аппаратуры РГБ и некогерентно накопленные выборки продетектированного широкополосного сигнала аппаратуры гермоблока ЛВА передавать на береговой или корабельный пост анализа интерференционных сонограмм и СНЧ АМ. Для стационарной ГАС с планарной антенной необходимо на береговой пост передавать для каждого из К=128 пространственных каналов каждого из ЧД1 и ЧД2 осредненные (Тн=10 с) выборки спектральных коэффициентов S66 … S255 (М=170). Также для ЧД1 необходимо передавать Кпродетектированных и первично накопленных с Тнн1=10 с выборок АМ огибающей ШП несущей (для анализа СНЧ сигналов и вторичного некогерентного накопления данных трассовой панорамы) и для ЧД2 - К продетектированных и первично накопленных с Тнн1=0,0025 с выборок АМ огибающей ШП несущей (для возможности анализа спектра АМ огибающей в области частот огибающей ниже 200 Гц и дальнейшего некогерентного накопления данных трассой панорамы).
Так как данные каждого РГБ и ЛВА – одноканальные и низкочастотные, то не должно возникать больших проблем при их ретрансляции через аппаратуру соседних РГБ или ЛВА ни методом звукоподводной связи (ЗПС), ни методом радиосвязи через антенну всплывающего буя. При использовании последовательной ретрансляции данных методом ЗПС приходится учитывать ограничения на время запаздывания информации с учетом скорости звука в воде (около 1,5 км/с) и суммарного расстояния передачи. При суммарном расстоянии 150 км эта задержка составляет 100 с. Оценим поток непосредственно передаваемой информации без учета методов помехоустойчивого кодирования.
Для данных одного РГБ при передаче N-разрядных выборок M спектральных коэффициентов этот поток Пргб=Nр*Msi/Тн=96 Бод
(Nр=16, Мsi=60, Тн=10 с).
Для данных одной ЛВА аналогичный поток еще меньше:
Плва=Nр /Тнн1=2 Бод
(Nр=20, Тнн1=10 с).
Помимо повышенных дистанций классификационного обнаружения слабошумящих ПЛ-целей, такой малый поток передаваемой на пост информации является еще одним несомненным преимуществом предлагаемых для тиражирования устройств по сравнению с традиционными РГБ или ЛВА.
Для данных аппаратуры гермоблока ГАС «Дельта-С» этот поток:
Пд-с=К*(2*Nр si*Msi/Тнsi Nр нннч/Тнн1 нч Nр ннвч/Тнн1 вч)=889088 Бод
(Nр si=16, Мsi=170, Тнн1 нч=10 с, Тнн1 вч=0,0025 с).
Этот поток достаточно большой, но он не менее, чем в два раза меньше потока для варианта передачи оцифрованных канальных сигналов ЧД1 и ЧД2 до горизонтального диаграммоформирования. В этом случае, для передачи оцифрованных, например, даже только 8-разрядными АЦП, сигналов НЧ-к1 … НЧ-к32 и ВЧ-к1 … ВЧ-к32 (при частоте дискретизации fд>2*fв=3600 Гц) потребовался бы поток:
П>8*2*32*3600=1843200 бод.
С учетом большого опыта «НИИ «Атолл» в реализации помехоустойчивых устройств уплотнения-разуплотнения передаваемых на большие расстояния антенных сигналов системы «Север», ему можно было бы поручить разработку, изготовление и постановку на грунт (совместно с ВМФ) антенн ГАС «Дельта-С» («Дельта-С2»). Когда-то, в разговоре с нами, готовность разработать небольшую антенну, устанавливаемую на грунт с защитой от рыбацких тралов, выражали и специалисты ЦКБ «Лазурит». Аппаратура первичной, вторичной и совместной (для нескольких антенн) третичной обработки сигналов антенн, реализуемая в ЗАО «НПП «Союз», по предварительной оценке, примерно в 3 раза дешевле аналогичной бортовой аппаратуры ГАС «Дельта-ПМ1».
Разработку и изготовление предлагаемых простых устройств с одиночным гидрофоном и с ЛВА можно поручить либо тому же «Атоллу» (при изготовлении модуля спецвычислителя в ЗАО «НПП «Союз»), либо имеющим большой опыт изготовления РГБ и буевых станций специализированным предприятиям Смоленска или Владивостока (завод «Дальприбор»).
Оценка возможностейприменения рассмотренных в данной части статьи устройств позволяет сделать следующий вывод:
При тиражировании предлагаемых стационарных РГБ, ЛВА и ГАС «Дельта-С», с учетом тиражирования ранее рассмотренных корабельных ГАС с высокими военно-экономическими показателями, можно в короткие сроки относительно недорого решить проблему подводного (и надводного) освещения ГА обстановки на больших площадях и в глубоководных камчатском и дальневосточном районах Тихого океана, и в Черном море, и в мелководных Балтийском и северных морях.
Чуть ранее вышли материалы:
- Есть ли в России современное гидроакустическое вооружение? Часть 1
- Есть ли в России современное гидроакустическое вооружение? Часть 2
- Есть ли в России современное гидроакустическое вооружение? Часть 3
- Есть ли в России современное гидроакустическое вооружение? Часть 4
- [Есть ли в России современное гидроакустическое вооружение? Часть 5
Валентин и Виктор Лексины